معرفی سیستم کنترلی کن-باس (Can-Bus) و کاربرد آن در ماشین آلات ریسندگی


قاسم حیدری، فوق لیسانس مهندسی تکنولوژی ماشین آلات نساجی
تعداد واحدهای یک ماشین ریسندگی افزایش یافته است و در در اتوکنر تا 60 و در ماشین اوپن اند تا 450 چشمه را شامل می شود. هر چشمه داری المان های الکتریکی زیادی می باشد که باید تحت کنترل باشد و فرمان مورد نظر را در یافت و اطلاعات مورد نظر را ارسال نماید.
تنوع و تعداد بالای المان ها و سیستم های کنترلی یک واحد اتوکنر را درنظر بگیرید. علاوه بر واحد پردازنده اطلاعات واحد، واحد پردازنده اطلاعات ماشین نیز به بیشتر این اطلاعات کنترلی نیازمند است.
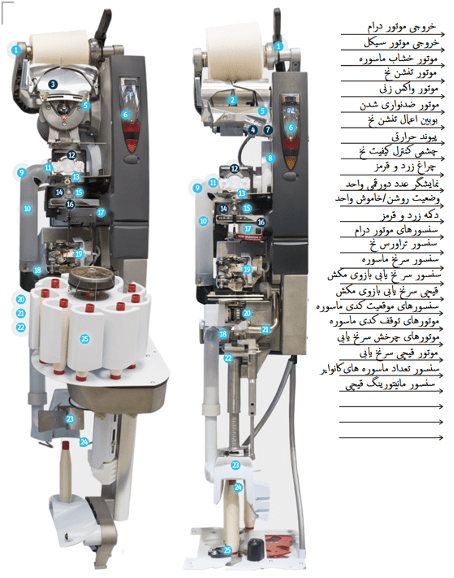
درصورتیکه تعداد این المان ها در هر واحد را 20 عدد در هر واحد در نظر بگیریم و اطلاعات 10 عدد از آنها در کنترل ماشین مورد استفاده قرار گیرد، از هر واحد باید 10 عدد سیم ارتباطی به سیستم پردازنده اصلی ماشین متصل شود که برای 60 واحد تعداد سیم ها برابر 600 سیم خواهد شد که باید به برد پردازنده اصلی متصل شود. علاوه بر کنترل واحدها، کنترل سایر اجزا مانند ساکشن واحدها، تغذیه اتوماتیک ماسوره، سرنخ یابی ماسوره، دافر، نظافتگر پیمایشی و … نیز شامل سیم های ارتباطی اطلاعات می باشند که برخی آنها باید با پردازنده اصلی در ارتباط باشند.
علاوه بر ناممکن بودن جانمایی بیش از 600 پورت روی یک برد و سختی های ناممکن اتصال و عیب یابی آن، حجم بالای سیم کشی هزینه هنگفتی به ماشین ساز تحمیل می کند و حجم بالای سیم کشی ها باعث مشکل بزرگ در عیب یابی می شد و بعضا تعویض کل سیم ها از عیب یابی راحتتر بود.
اولین کنترل کن (Control Area Network) توسط اینتل در سال 1987 ارایه شد و در خوردروهای بنز و بی ام و با موفقیت بکار گرفته شد. در واقع می توان گفت که شبکه کن از طریق مدیریت تعداد زیادی از تجهیزات الکترونیکی مانند موتورها و جک ها و بوبین ها با استفاده از اطلاعات دریافتی از سنسورها با استفاده از یک سیم برای ایجاد یک شبکه انتقال سیگنال و قدرت بصورت یکپارچه، باعث توسعه سیستم های الکترونیکی و کنترلی شد.
در ادامه به ویژگی های بارز کنترل کن-باس اشاره می شود.
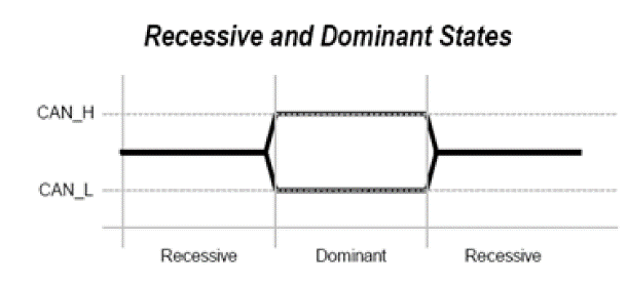
حالت نهفته (Recessive)و حالت برجسته(Dominant) بجای سیستم باینری صفر و یک
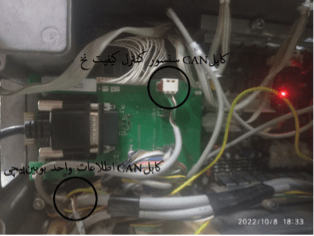
در این نوع شبکه تبادل اطلاعات، به جای استفاده از یک سیم 1 بیتی صفر و یک سیستم اعداد باینري، از یک جفت سیم (trunk) تفاضلی با سیم های CAN_L و CAN_H و از حالات باس نهفته و برجسته بجای صفر و یک استفاده شده است. حالت نهفته هنگامی رخ میدهد که دو سیم CAN_Lو CAN_H داراي پتانسیل یکسانی باشند و حالت برجسته زمانی رخ میدهد که دو سیم با یکدیگر اختلاف پتانسیل داشته باشند. باس CANوقتی غیر فعال است به صورت نهفته باقی میماند.
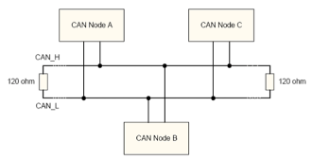
استفاده از ترمیناتور در انتهای سیم سیگنال
ترمیناتور مقاوتی حدودا 120اهمی است که در دوطرف باس بین CAN_L و CAN_H قرار میگیرد و جذب سیگنالها و جلوگیری از اکو شدن سیگنال ها با دامنه ي معکوس روي سیم برگشت (جذب امپدانس) را برعهده دارد تا نویز سیگنال برگشتی، سیگنالهاي داده را خراب می کند.
پروتکل ارسال اطلاعات CAN
این پروتکل هیچ گونه وقفه ايبراي انتقال پیغام ندارد اما اولویت فرستادن پیغام را براي عدم برخورد خواهد داشت و معمولا پیغام اورژانسی را در اولویت قرار می دهد.کن یک باس انتقال با اولویت است و گره ها دارای نشانی نیست.
در سیستم ارسال اطلاعات بر پایه ایستگاه و آدرس، هر ایستگاه براي خود یک آدرس منحصر به فردیا ID دارد. با ارسال اطلاعات از Master که حاوي یک آدرس نیز هست، فقط ایستگاه مورد نظر اطلاعات را دریافت می کند و برای هر داده تنها یک گیرنده وجود دارد.
در پروتکل CAN ارسال اطلاعات بر اساس آدرس نیست و از روش Broad Cast استفاده می شود. تمام ایستگاهها اطلاعات را دریافت کرده و با توجه به نوع و محتواي آن در مورد پذیرش یا رد آن تصمیم می گیرند. پس هر کنترلر از سنسور های سایر اجزا نیز می تواند اطلاعات دریافت کند.
در واقع بجاي آدرس دهی بهمراه محتوای پیام، محتواي پیام ارسالی به همراه اولویت آن، ارسال می شود تا اولویت ارسال آن در تمام ایستگاه ها رعایت شود. در واقع امکان داشتن چند گیرنده نیز وجود دارد که باعث می شود در تعداد اطلاعات ارسالی مورد نیاز کاهش چشمگیری حاصل شود.
بدین ترتیب هر ایستگاهی که آن اطلاعات برایش داراي اهمیت باشد آن را پذیرش کرده و از آنها استفاده می کند، بقیه ي ایستگاهها اطلاعات را رد میکنند. این ویژگی باعث انعطاف پذیري زیاد سیستم و ساختار به دلیل آدرس دهی بر اساس محتوا و امکان اضافه کردن راحت ایستگاهها به شبکه بدون اصلاحات سخت افزاري یا نرم افزاري اشاره کرد.
علاوه بر انتقال سیگنال دیجیتال (بیشتر اتفاقات و وضعیت ها بصورت فعال و غیرفعال)، سیگنال های آنالوگ (مقادیر سنسور متغیر در طول زمان) با استفاده از مبدل های آنالوگ به دیجیتال و در نظر گرفتن اولویت و زمان انتقال این سیگنال های تبدیل شده، کنترل های آنالوگ نیز میسر می شود.
بدین ترتیب، سیستم کن-باس محدودیت ارتباطات سریالی شامل عرض باند و سرعت، عملکردپذیری و تعداد تجهیزات را ندارد. چون داده ها یا بصورت دوره ای یا بنا به درخواست ارسال می شود. سیستم هاي CAN بسیار سریع هستند و قابلیت انتقال حداکثر7600 پیغام 8بایتی و18000سیگنال راه انداز در ثانیه را داراخواهند بود.
علاوه بر ارسال داده های مربوط به سنسورهای المان های الکتریکی، داده هایی جهت مکانیزم های تشخیص خطا اختصاص داده می شود و گره هایی خطاها را تشخیص و یک نشانه خطا ارسال می کند تا شناسایی خطا در مجموعه بسیار زیادی از المان ها و کنترلر ها به راحتی صورت گیرد.
در مطالب ارائه شد سعی شد ضرورت استفاده از سیستم های کنترلی جدید و توجه بیشتر به آنها توضیح و سیستم کن-باس که اولین و ساده ترین سیستم کنترلی شبکه ای صنعتی توسعه یافته می باشد بصورت اجمالی ارائه گردد.
همانطور که گفته شد مقایسه سیم کشی بوبین پیچ اتوکنر از واحدها به پردازنده با توجه به تعداد بالای واحدها و تعداد بالای المان های موجود در هر واحد، کنترل بدون سیستم کن-باس غیر ممکن بنظر می رسد. با توجه به سرعت بالای الکتریکی شدن مکانیزم های مکانیکی و الکترونیکی شدن کنترل ها، توجه بیشتر به از این نوع سیستم های کنترلی شبکه ای هایز اهمیت ویژه ای خواهد بود.